Data aggiornamento: luglio 2025.
Una delle caratteristiche dei plc soprattutto che riguarda l’esecuzione dei programmi è una variabile che si chiama tempo di scansione. In questa lezione parleremo di questa variabile e impareremo a valutarla nel contesto del processo che il plc deve controllare.
Scopriremo come calcolare il tempo massimo di scansione accettabile a seconda delle esigenze del campo e quale soluzione adottare nel caso di processi con caratteristiche particolari di velocità.

Ecco gli argomenti della lezione:
Cosa significa tempo di scansione.
Come conoscere i tempi di scansione del plc.
Come considerare il tempo di scansione in base al processo automatizzato.
Valutazione del tempo di scansione in base al processo.
Ingressi veloci e contatori veloci nei plc.
Qualsiasi programmatore di plc prima o poi si trova a dover confrontarsi con il tempo di scansione (o tempo di esecuzione) dell’apparecchio. Che cosa significa “tempo di scansione”? Per meglio comprendere questa definizione guardiamo la prossima immagine.

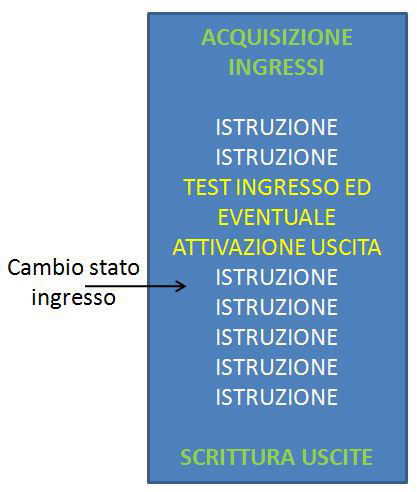
Come vediamo nella figura appena sopra, supponiamo che nel nostro software venga valutato un ingresso (linea di istruzione gialla) e poi in base a questo attivata o meno un’uscita. Ecco cosa può accadere:
Prima scansione: il test risulta negativo e il programma passa all’istruzione successiva.
A questo punto l’ingresso testato varia ma ormai non viene visto e l’uscita non viene attivata.
Seconda scansione: il sistema acquisisce gli ingressi e finalmente alla linea di programma con il test l’ingresso interessato viene visto; l’uscita sarà attivata e scritta alla fine della scansione.
Il risultato di questo caso limite è che il tempo di reazione del sistema plc è di quasi il doppio del tempo di scansione.
Valutazione del tempo di scansione in base al processo.
Alla luce di quanto sopra, la domanda che il programmatore deve porsi per valutare il tempo di scansione del plc è :”qual è l’attività nel mio processo che richiede il tempo di risposta più veloce?”
Facciamo un esempio, se dobbiamo attivare una pompa e questa viene accesa 50 millisecondi in ritardo, questo può causare inconvenienti al nostro processo? Se la risposta è no allora non ci sono problemi.
Chiaramente parliamo di un avviamento in un sistema dove la pompa magari rimarrà accesa per dei minuti o per almeno qualche secondo, in quel caso probabilmente i tempi del nostro sistema sono abbastanza dilatati per doversi preoccupare del tempo di scansione del plc.
Facciamo ora però un altro esempio, e supponiamo di dover leggere degli impulsi forniti da un misuratore di portata che impieghiamo per dosare un liquido. Sappiamo che la portata del liquido data dalla pompa che lo muove è di circa 10 mila l/h, e vogliamo una precisione di almeno un etto (assumiamo peso specifico del liquido 1), quindi 10 impulsi litro.
Ogni quanto avremo un impulso a quella portata? Vediamo i calcoli di questo processo nella prossima immagine.
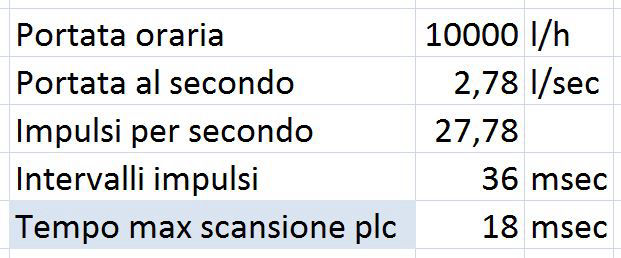
Dividendo la portata oraria per 3600 otteniamo la portata in litri al secondo che è 2,78. A questo punto visto che vogliamo dieci impulsi per ogni litro per avere la precisione di un etto gli impulsi al secondo saranno 2,78 moltiplicato 10, quindi 27,78.
Dividendo 1000ms per 27,78 otteniamo che ogni 36 millisecondi il sistema ci darà un impulso, a questo punto il nostro tempo di scansione massimo dovrebbe essere di 18 millisecondi per garantirci di non perdere nemmeno un impulso. Con questo tipo di processo un’occhiata al tempo di scansione del nostro plc, soprattutto se egli sta comunicando con diversi sistemi scada o altre cpu, sarebbe meglio darla!
Ingressi veloci e contatori veloci nei plc.
Dall’esempio che abbiamo appena elaborato si evince che per alcune operazioni nei processi potrebbe essere necessario avere la possibilità di acquisire ingressi velocemente ed elaborarli altrettanto in fretta per esempio quando li si conta.
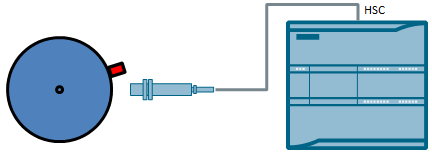
Applicazioni veloci sono quelle che impiegano rilevatori di prossimità, rilevatori laser ed encoders. I plc a tal proposito solitamente ci mettono a disposizione, oltre che i normali ingressi e contatori, un piccolo numero di ingressi veloci e contatori veloci (HSC) che ci permettono di operare proprio in questi frangenti.
Utilizzando questi speciali ingressi e queste istruzioni non dobbiamo preoccuparci del tempo di scansione che invece andrà a influenzare tutto il resto dove non è necessaria una reazione del sistema così veloce.
Nella prossima immagine vediamo un micro di prossimità che deve leggere la rotazione veloce di un albero, il sistema utilizza un HSC (high speed counter) nel plc per ricevere tutti gli impulsi.