Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: luglio 2025.
Cos’è un regolatore PID e come funziona? Come avvengono le regolazioni delle variabili di processo nell’industria automatizzata? Quali sono le funzioni che ci permettono di regolare per esempio la temperatura in un sistema di pastorizzazione oppure la portata di un fluido, o ancora la sua pressione?

Ecco gli argomenti di oggi:
Le regolazoini nell’industria automatizzata.
Il compito dei regolatori in continuo.
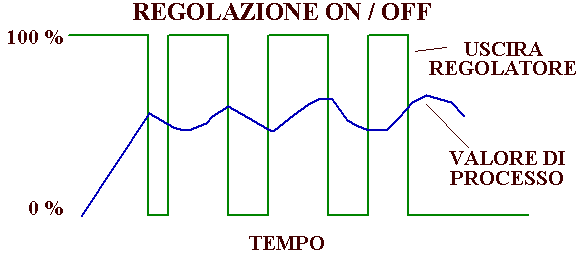
Regolazione di tipo ON e OFF.
Regolazione in continuo di tipo PID.
Funzionamento dei parametri PID.
Regolatori hardware con apparecchiature dedicate.
Regolatori PID nei programmi PLC.
Le regolazioni Fuzzy.
Le regolazioni nell’industria automatizzata.
Chi lavora nell’automatizzazione di processi, che si tratti di quelli dell’industria alimentare, della gestione del gas e olio, o qualsiasi altra area d’applicazione, sa quanto siano importanti i sistemi di regolazione che mettiamo in campo sia con mezzi hardware (apparecchi regolatori dedicati), che con funzioni software che svolgono il ruolo di regolatori programmabili nei PLC. Queste funzioni di regolazione sono di vario tipo e sono comunque tra le funzioni indispensabili per controllare le linee automatiche.
Nei prossimi paragrafi vedremo i tre principali tipi di regolazione in continuo e scopriremo come queste agiscono sull’organo di regolazione, rispetto al valore attuale della variabile da controllare e il set point desiderato.
Il compito dei regolatori in continuo.
Un classico esempio di necessità di regolazione continua è la gestione di una temperatura di un fluido in un contenitore, o meglio ancora di un fluido che attraversa un sistema di riscaldamento o raffreddamento.
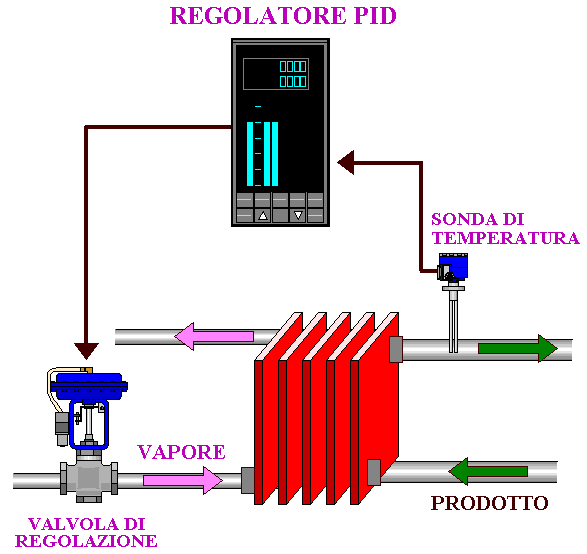
Nella prossima immagine troviamo un sistema di regolazione temperatura prodotto, che sfrutta il vapore immesso nello scambiatore di calore attraverso la valvola di regolazione. La temperatura viene letta dall'apposita sonda posta sulla tubazione del prodotto.
Per funzionare, un regolatore PID deve essere parametrizzato fornendogli tre principali variabili: l’azione proporzionale, il tempo di integrazione e quello di derivazione. Il sistema per mezzo di queste variabili riesce a regolare in maniera continua l’organo di uscita per far si che la variabile controllata raggiunga il valore di set e rimanga nei pressi di questo.
Nella prossima figura vediamo il principio di funzionamento.
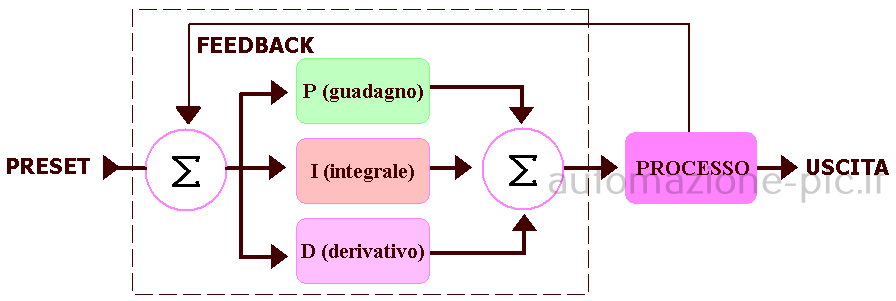
Come vediamo, abbiamo un set point e una variabile da controllare che si discosta da questo generando quello che chiamiamo “errore”. Il controllore sfrutta le tre azioni (proporzionale, integrale e derivativa) per generare l’uscita 0..100% da mandare all’organo regolatore.
Funzionamento dei parametri PID.
Come si parametrizza un regolatore PID?
L’azione proporzionale indica la forza dell’azione del regolatore, ovvero di quanto questo reagirà modificando l’uscita in base alla situazione. Più questo parametro è alto più il regolatore agisce.
Il tempo integrale determina la velocità di reazione del regolatore, in pratica con tempi corti il regolatore agisce più volte nel tempo, mentre con tempi lunghi diventa più lento.
Il tempo derivativo determina una variazione dell’uscita in base alla velocità con cui la variabile controllata sta cambiando.
Solitamente si possono ottenere buone regolazioni anche utilizzando solamente le azioni proporzionale e integrale (regolazione PI); quella derivativa a seconda dei processi su cui si applica può essere utile o meno, se non addirittura dannosa.
I regolatori PID vengono parametrizzati anche con altre variabili come uscita minima e massima, offset sull’uscita e abilitazione dell’azione manuale o automatica; in sostanza però i principali parametri sono quelli che abbiamo visto sopra.
Regolatori hardware con apparecchiature dedicate.
Oggi per controllare le variabili di processo abbiamo a disposizione molte apparecchiature dedicate che eseguono la regolazione PID in modo ottimale; possiamo però anche utilizzare istruzioni, o meglio blocchi di funzioni che svolgono lo stesso compito nel software del PLC.
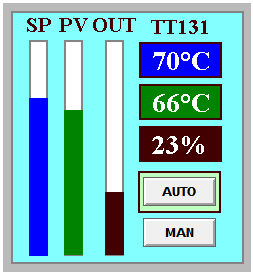
La capacità di calcolo dei controllori logici programmabili permette di avere diversi regolatori nello stesso programma, e con i sistemi HMI e SCADA possiamo anche creare le interfacce grafiche che possono somigliare molto agli apparecchi reali.
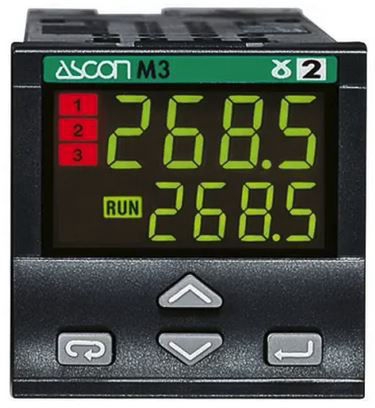
Nella prossima immagine vediamo un regolatore della Ascon, questo modello si chiama M3 ed è largamente impiegato per regolare le temperature caldo / freddo. Questi oggetti sono molto sofisticati e possono offrire anche porte di comunicazione seriali e ingressi e uscite ausiliari per allarmi e comandi dall’esterno.
Regolatori PID nei programmi PLC.
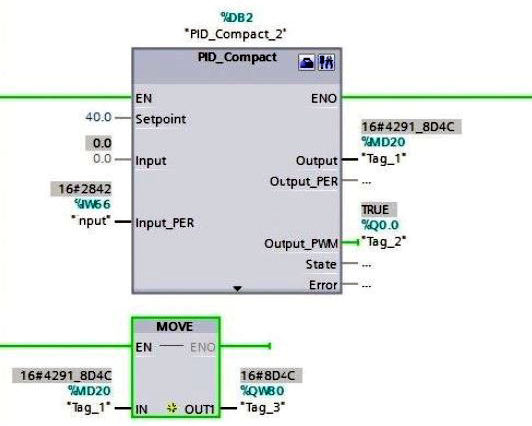
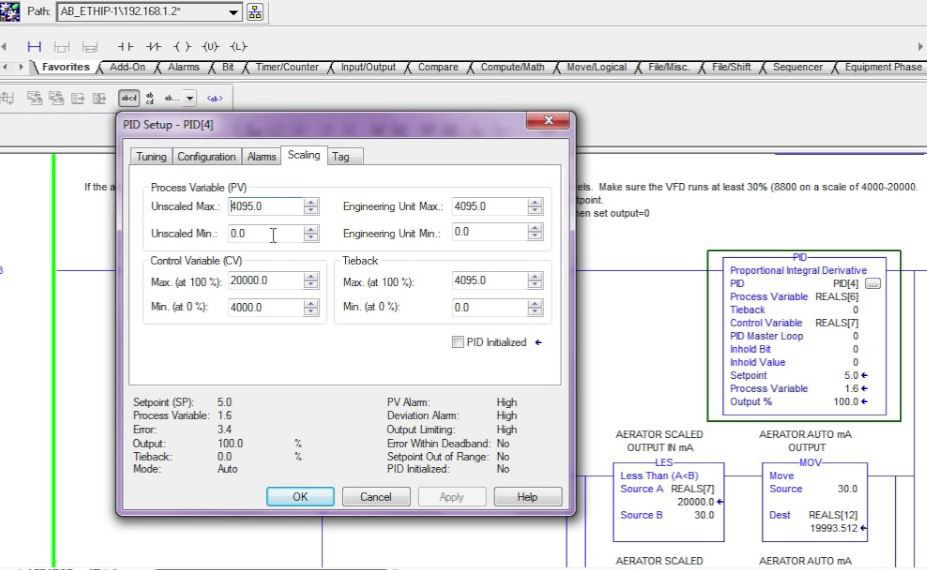
Per quanto riguarda i PLC, esistono oggi istruzioni di regolatori PID compatte e configurabili con i parametri essenziali (Compact PID), oppure complete funzioni con molti parametri, che possiamo facilmente inserire nei blocchi di programma e nei diversi linguaggi per plc come il ladder, il linguaggio a blocchi di funzione o quello di testo strutturato.
Nella prossima immagine vediamo l’istruzione regolazione PID per il plc S7-1200.