Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: ottobre 2025.
Benvenuto in questa lezione dedicata all’automazione industriale, oggi ci occupiamo di un protocollo di comunicazione chiamato EtherCAT. I protocolli di comunicazione industriale svolgono un ruolo fondamentale negli impianti automatizzati, poiché permettono a PLC, ai sistemi di monitoraggio e alle apparecchiature di scambiare dati.

Ecco gli argomenti di oggi:
Reti e bus di campo industriali.
Architettura della rete EtherCAT.
Topologia della rete EtherCAT.
Caratteristiche e performances della rete EtherCAT.
Sistema di orologio distribuito della EtherCAT (EtherCAT Distributed Clocks).
Ridondanza della rete EtherCAT.
Reti e bus di campo industriali.
Come accennato nell’introduzione di questa lezione, le reti e i bus di campo rappresentano la spina dorsale dei sistemi d’automazione industriale, dato che senza di queste le apparecchiature, i plc e i sistemi di supervisione non potrebbero colloquiare.
Con l’evoluzione dell’elettronica e dei sistemi informatici, anche le reti impiegate nell’automazione dei processi sono cambiate e sono migliorate, soprattutto oggi che andiamo in contro all’industria 4.0.
La tecnologia Ethernet permette scambi di dati veloci e integrazione delle varie aree della fabbrica, compresa quella a più basso livello dove le apparecchiature e i controllori risiedono.
La rete EtherCAT (Ethernet for Control Automation Technology) è una tra le reti più diffuse nell’automazione industriale.
Architettura della rete EtherCAT.
La rete EtherCAT usa frames e strati della rete Ethernet così come il layer fisico descritto nella IEEE 802.3, con alcuni accorgimenti diretti a migliorare la velocità utilizzando meno dati e cercando di limitare i costi.
Tra le rete Ethernet e la EtherCAT ci sono delle differenze, vediamole insieme:
la Ethernet in se non è molto adatta per scopi industriali, infatti utilizza un sistema di routing (instradamento dei pacchetti) relativamente dispendioso in termini di dati necessari per la trasmissione, quando magari poi i dati da trasmettere sono pochi, come per esempio una semplice word di dati contenente un valore analogico per il PLC.
EtherCAT dal suo canto, impiega un protocollo specifico dove solamente il master può trasmettere frames, questi frames poi vengono inoltrati dalle altre apparecchiature sulla rete, e ognuna di queste aggiunge i propri dati al pacchetto; questo metodo limita i ritardi e funziona meglio per avere dati real-time.
Topologia della rete EtherCAT.
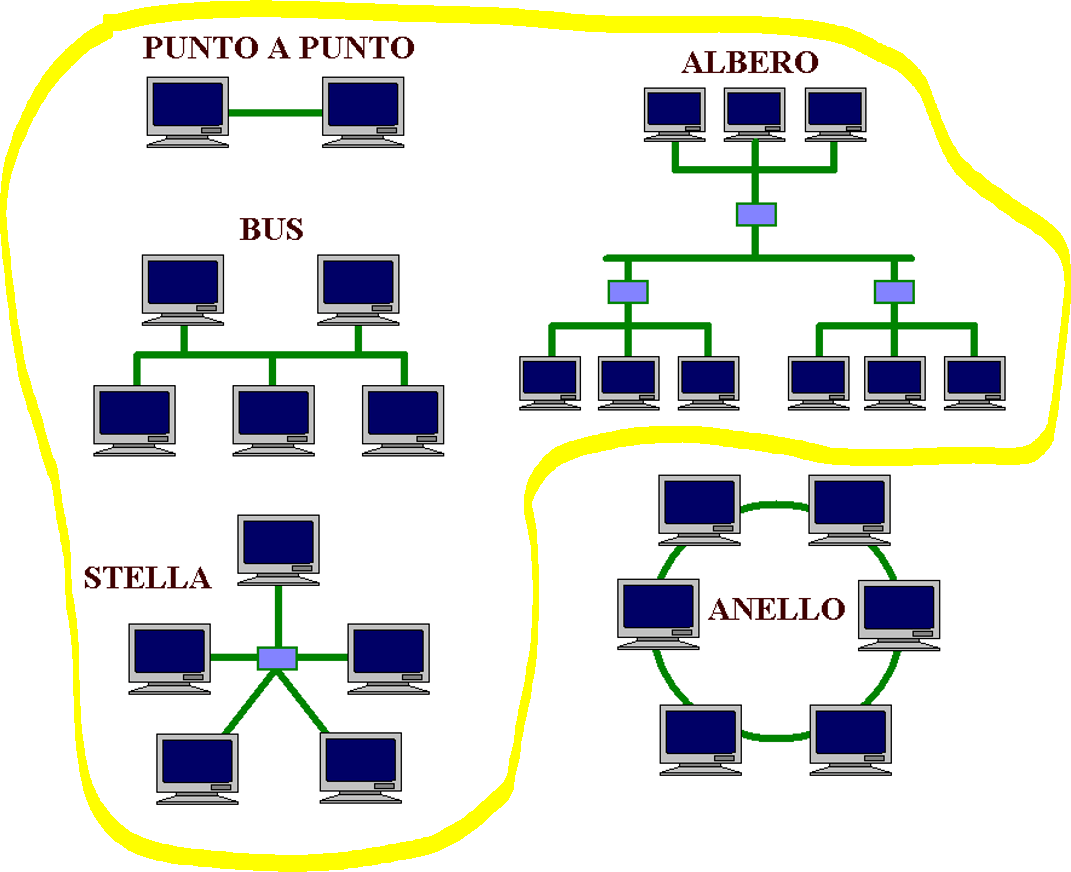
L’architettura topologica della rete EtherCAT comprende i modelli a linea, a bus, ad albero e a stella, come vediamo nell’immagine che segue.
La topologia a stella è quella tipica adottata dalla rete Ethernet che tutti conosciamo; ed EtherCAT può essere impiegata anche su bus di campo, questa caratteristica la rende estremamente flessibile per le applicazioni industriali.