Data aggiornamento: luglio 2025.
Benvenuto in questa lezione e sul mio sito dedicato all’automazione industriale, oggi parliamo di encoders. Vedremo cosa sono, a cosa servono e come funzionano.
NOVITÀ!
Tra i corsi che trovi su questo sito, trovi anche il videocorso per imparare a leggere gli schemi elettrici e quelli P&ID, oltre che il corso per imparare a progettare i quadri elettrici d'automazione.
Clicca sull'immagine quì sotto per dare un'occhiata a tutti i corsi disponibili.

Ecco gli argomenti di oggi:
Gli encoders nell’automazione industriale.
Principio di funzionamento degli encoders.
Com’è fatto fisicamente un encoder.
Encoders incrementali e assoluti.
La risoluzione degli encoders.
Utilizzo degli encoders con i plc.
Gli encoders nell’automazione industriale.
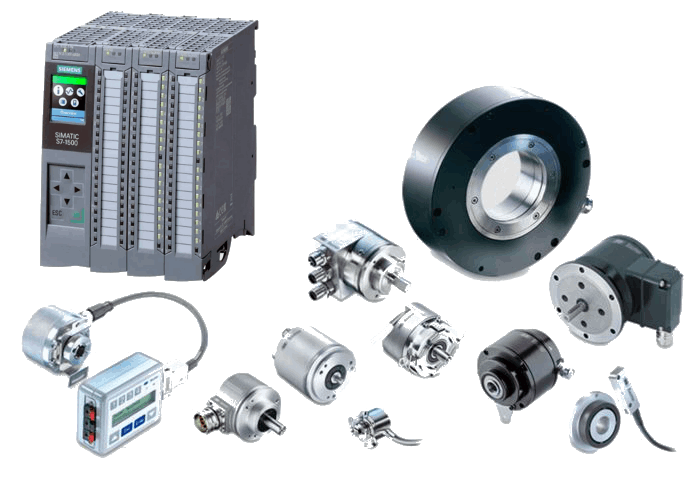
Nell’automazione industriale ci sono oggetti che a volte non si vedono ma che svolgono un ruolo fondamentale, tra questi troviamo gli encoders. Questi apparecchi dalla forma cilindrica e che spesso somigliano a motori, vengono utilizzati dove è necessario gestire il posizionamento, la movimentazione, la misurazione, così come in altri ambiti d’applicazione.
Per esempio possiamo utilizzare un encoder per misurare la velocità di un motore, oppure la distanza percorsa da un nastro trasportatore, o ancora per controllare il movimento dei bracci meccanici e di altri elementi.
Principio di funzionamento degli encoders.
Ci sono oggi in commercio diversi tipi di encoders, il cui principio di funzionamento può variare. Abbiamo encoders ottici, oppure magnetici, poi ci sono i modelli con conteggio incrementale oppure assoluto; qualsiasi sia il tipo di encoder che utilizziamo, questo ci permetterà di contare degli impulsi oppure di leggere dei valori per misurare le variabili desiderate.
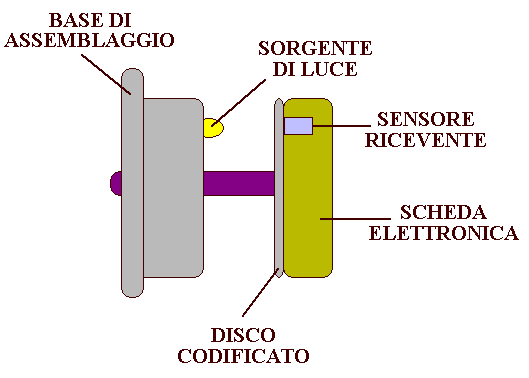
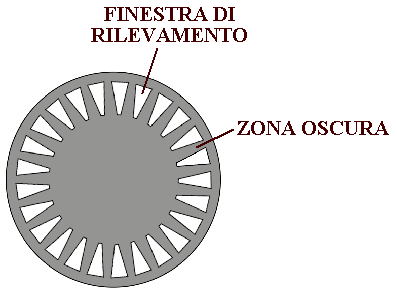
Nella prossima immagine vediamo il principio di funzionamento di un encoder ottico, notiamo la presenza di un disco forato, di una sorgente luminosa e di un ricevitore.
Quando l’albero dell’encoder gira, la luce passa attraverso la parte forata del disco e genera un impulso. Noi possiamo contare questi impulsi per misurare il movimento, la velocità, e con opportuni riferimenti, anche le distanze percorse.
Tra i diversi tipi di encoders sono molto diffusi anche quelli di tipo lineare, questi hanno una forma diversa e misurano non la rotazione ma lo spostamento appunto lineare; ne vediamo uno di tipo magnetico nella prossima figura.

Encoders incrementali e assoluti.
Nel mondo degli encoders troviamo principalmente due tipi di apparecchio: quelli che misurano in modo incrementale (trasmettono impulsi), e quelli assoluti che invece trasmettono un valore assoluto numerico.
La scelta del tipo di encoder da utilizzare dipende dalle applicazioni, dal punto di vista costruttivo gli encoders di tipo assoluto sono più complessi e perciò più costosi, mentre per quanto riguarda il funzionamento, questi permettono di avere informazioni precise riguardo alle misurazioni, senza dover effettuare calcoli che invece con gli encoders di tipo incrementale sono affidati alla programmazione.
Gli encoders possono anche essere a singolo giro o multi giro.
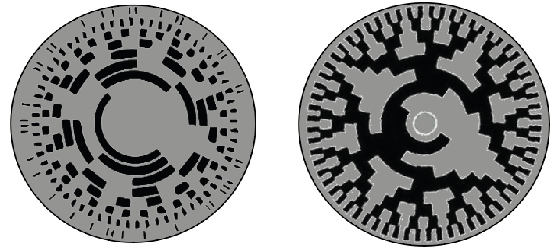
Nella prossima immagine vediamo due dischi di codifica di encoders assoluti.
Come dicevamo, l’encoder incrementale ci fornisce degli impulsi che nel sistema d’automazione saranno gestiti per calcolare velocità, movimenti e distanze. Con questo tipo di apparecchio è necessario decidere un punto di “zero” per misurare i movimenti e tenere traccia delle posizioni.
L’encoder assoluto misura una posizione assoluta codificando il dato in binario e non necessita di riferimenti per lo zero. Nell'immagine sopra notiamo che i dischi degli encoder assoluti sono molto più complessi e contengono fessure che forniscono dati univoci per ogni posizione.
La risoluzione degli encoders.
Una delle variabili più importanti da considerare quando si sceglie un encoder è la sua risoluzione, maggiore è la risoluzione, più precisamente saremo in grado di misurare gli spostamenti.
La risoluzione degli encoders incrementali si esprime in PPR (impulsi per giro), oppure CPR (cicli per giro); mentre per quanto riguarda gli encoders assoluti, la precisione è indicata dal numero di bit che essi utilizzano per esprimere il valore della misura. Per esempio 18 bit o 262144 cpr, 19 bit o 524288 cpr e così via.
Nella prossima immagine vediamo un encoder di tipo incrementale della IFM Electronics, questo modello ha risoluzione che può arrivare a 10 mila impulsi per giro e viene alimentato a 24V in corrente continua.

Utilizzo degli encoders con i plc.
Oggi troviamo in commercio encoders che possono essere collegati ai plc in diversi modi, dal più semplice che fornisce gli impulsi agli ingressi veloci, agli apparecchi più sofisticati con schede di rete che possono interfacciarsi direttamente con i bus di dati come PROFINET, PROFIBUS, ETHERNET/IP, MODBUS e altri.
Nella prossima immagine troviamo un encoder della Dynapar con interfaccia per rete PROFINET.

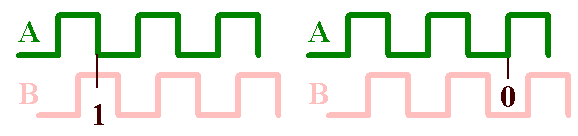
Gli encoder incrementali più semplici forniscono due segnali a onda quadra che rappresentano due impulsi sfasati tra loro di 90 gradi.
Nei PLC possiamo conoscere la direzione del movimento osservando questi impulsi: quando sul fronte di discesa del segnale A corrisponde un segnale logico 1 della fase B, l’encoder sta girando in senso orario, se invece sul fronte di discesa della fase A abbiamo uno stato 0 del segnale B, allora l’encoder lavora in senso antiorario.
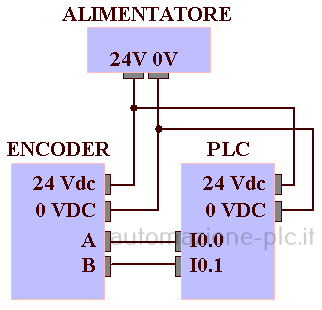
Nella prossima immagine vediamo il collegamento di un encoder incrementale con un plc Mitsubishi della serie FX5U.
Si nota che l’apparecchio è alimentato a 24V, e che fornisce al PLC i due segnali su due ingressi che dovranno essere di tipo veloce. Ricordiamo che visto che l’encoder fornisce impulsi molto velocemente, non possiamo utilizzare normali ingressi dei plc ma dobbiamo affidarci agli ingressi veloci che questi controllori ci mettono a disposizione. Anche i contatori devono essere di tipo veloce.
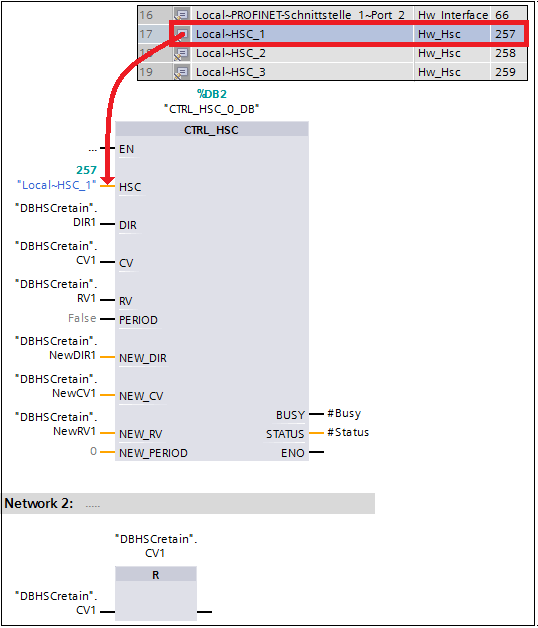
Per poter essere elaborati nel plc, gli ingressi veloci a cui colleghiamo l’encoder devono essere gestiti con gli HSC (high speed counters), ovvero contatori in grado di contare velocemente, indipendentemente dal tempo di scansione del programma del plc stesso.
Nella prossima immagine vediamo una funzione di programmazione PLC del TIA Portal Siemens, utilizzata proprio per gestire i contatori veloci e gli encoders.