Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: luglio 2025.
Che differenza c’è tra un encoder assoluto e un encoder incrementale? Quale tipo di encoder mi conviene utilizzare per la mia applicazione? Come si impiegano questi diversi tipi di apparecchio e quale dei due costa di più?
NOVITÀ!
Tra i corsi che trovi su questo sito, trovi anche il videocorso per imparare a leggere gli schemi elettrici e quelli P&ID, oltre che il corso per imparare a progettare i quadri elettrici d'automazione.
Clicca sull'immagine quì sotto per dare un'occhiata a tutti i corsi disponibili.

Ecco gli argomenti di oggi:
Introduzione agli encoders assoluti e incrementali.
Encoders lineari.
Encoders rotativi.
Differenze tra encoder assoluto e incrementale.
Meglio un encoder assoluto o un encoder incrementale?
Encoders assoluti a giro singolo e multi giro.
Costa di più un encoder assoluto o un encoder incrementale?
Introduzione agli encoders assoluti e incrementali.
Nell’articolo precedente a questo abbiamo scoperto gli encoders, analizzando come sono fatti, come funzionano e come utilizzarli con i plc. Oggi ci soffermiamo sulle differenze tra il modello di encoder assoluto e quello incrementale, cominciando col dire che abbiamo sostanzialmente due tipi di encoders: lineare e rotativo.
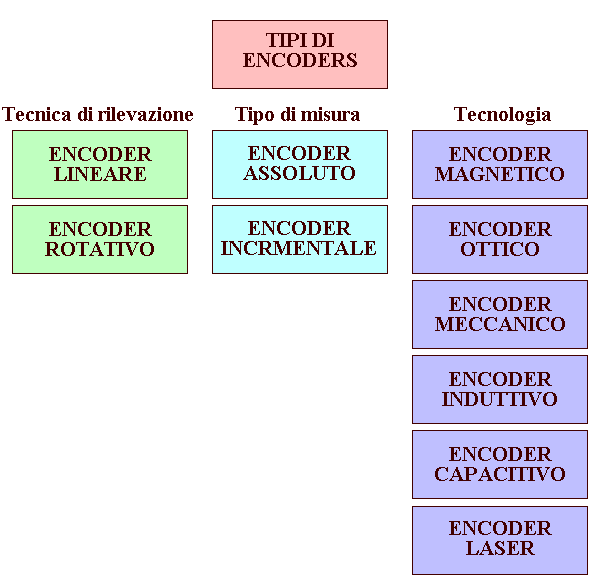
Le due tipologie di apparecchio si dividono a loro volta in assoluti e incrementali, e tutti gli encoder funzionano per mezzo di diverse tecnologie: ci sono encoders magnetici, ottici, meccanici, induttivi, capacitivi e laser.
Nella prossima immagine vediamo riassunta la classificazione degli encoders come appena descritto.
Encoders lineari.
L’encoder di tipo lineare misura una distanza lineare tra due punti per mezzo di un trasduttore. Naturalmente misurando le distanze, questo tipo di encoder è anche in grado di farci conoscere la posizione di un oggetto lungo l’asse del movimento, e le velocità di spostamento.
Per funzionare, l’encoder lineare utilizza cavi oppure delle aste, e il trasduttore legge le informazioni sul cavo o sull’asta per effettuare le misurazioni.
Un tipico utilizzo degli encoders lineari è quello sulle macchine CNC (macchine a controllo numerico), per esempio per movimentare la fresa, oppure un trapano, o un braccio meccanico.
Come già accennato in precedenza in questa lezione, questi encoders possono essere di tipo incrementale o assoluto; lo vedremo nel dettaglio nei prossimi paragrafi.
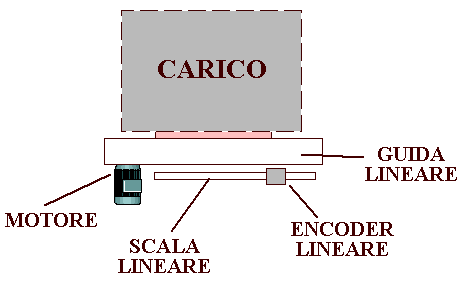
Ecco nella prossima immagine un’applicazione con encoder lineare. Notiamo che sull’asta è presente la scala lineare che viene letta dall’encoder.
Encoders rotativi.
A differenza degli encoders lineari, quelli rotativi non si muovono lungo un asse ma semplicemente ruotano per mezzo di un albero. La lettura delle informazioni avviene mediante l’utilizzo di una serie di fori sul disco che ruota.
A seconda del tipo di encoder la misura avviene per mezzo di un laser, oppure di un lettore ottico e così via; in modo semplice possiamo dire che la presenza di un foro sul disco rappresenta un’informazione 0 o 1 che viene letta.
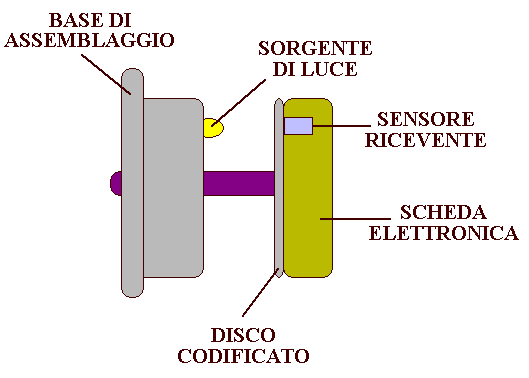
Ecco nella prossima immagine il principio di funzionamento dell’encoder rotativo di tipo ottico. La sorgente di luce emessa viene rilevata dal ricevitore attraverso le finestrelle di apertura nel disco dell'apparecchio.
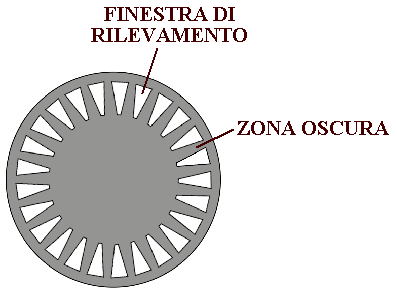
Differenze tra encoder assoluto e incrementale.
Il tipo di encoder che abbiamo visto nella figura sopra è un classico incrementale, ma cosa significa incrementale? Dato che questo tipo di encoder fornisce un’informazione alla volta sostanzialmente dello stesso tipo (zero o uno), l’apparecchio che utilizza l’encoder dovrà effettuare al suo interno i calcoli per conoscere posizione dell’albero, la velocità, e le distanze; in altre parole dovrà tener traccia delle informazioni.
Un encoder di tipo assoluto invece fornisce un numero che indica la posizione assoluta del disco. Per fare chiarezza su questi concetti, possiamo osservare la prossima figura.
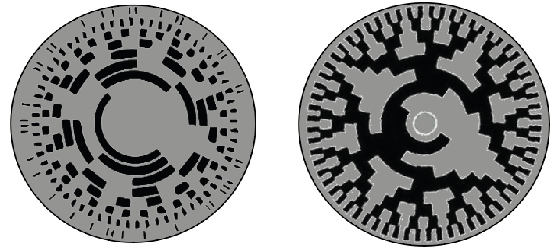
I dischi rappresentati sopra hanno diverse zone di lettura che forniscono informazioni univoche per ogni posizione. Chiaramente questo tipo di encoder è più complesso, tuttavia permette di semplificare la parte di calcolo per le misurazioni delle distanze, delle velocità e delle posizioni.
Facciamo un esempio, supponendo di voler misurare uno spostamento di 10 ipotetici gradi. Con l’encoder incrementale, nel PLC conteremo gli ingressi usando un contatore oppure totalizzandoli in altro modo, e dopo aver ricevuto 10 impulsi dall’encoder sapremo che il nostro asse è stato spostato di 10 gradi.
Con un encoder assoluto, sarà lui stesso a darci il totalizzatore che partirà da 1 e diventerà 2, 3, 4, fino ad arrivare a 10.
Anche il disco più a destra della figura sopra è di un encoder assoluto come il secondo, tuttavia questi due modelli hanno una codifica binaria del valore assoluto diversa.
Meglio un encoder assoluto o un encoder incrementale?
Visto come funzionano gli encoders di tipo assoluto e di tipo incrementale, possiamo chiederci quale dei due sia più indicato per le nostre applicazioni.
La prima considerazione da fare è che con l’encoder assoluto, in caso di perdita di alimentazione elettrica, al suo ritorno è in grado di darci istantaneamente la posizione dato che la misurazione è assoluta.
Supponiamo che invece di un encoder assoluto avessimo un encoder incrementale, e che durante la mancanza di tensione l’asse a cui l’encoder è collegato sia stato spostato manualmente, come faremmo a saperlo? L’utilizzo dell’encoder incrementale necessita di un “reset” della posizione e dei calcoli per essere sicuri di ripartire in maniera corretta.
Alla luce di quanto appena detto, risulta che l’encoder assoluto è indicato nelle applicazioni dove sia necessaria più sicurezza e minor tempo per il riavvio delle macchine.

Encoders assoluti a giro singolo e multi giro.
Gli encoders di tipo assoluto possono essere a un giro singolo (per piccoli spostamenti), o multi giro per applicazioni dove gli spostamenti sono maggiori.
L’encoder assoluto a giro multiplo misura oltre che un valore assoluto lungo una circonferenza del disco, anche il numero completo di evoluzioni che questo ha effettuato.
Questo tipo di encoder può essere impiegato per misurare spostamenti lineari di notevoli dimensioni, inoltre l’encoder multi giro permette di avere rilevazioni più precise, dato che la risoluzione dello stesso può aumentare, avendo a disposizione più spazio per la “mappatura” dei numeri.
Ecco nella prossima immagine il meccanismo di un encoder assoluto multi giro, somiglia molto a quello degli orologi meccanici.

Costa di più un encoder assoluto o un encoder incrementale?
Dato che la complessità costruttiva dell’encoder assoluto è maggiore di quella dell’encoder incrementale, è chiaro che anche il costo di è maggiore, e ancora di più se ci orientiamo verso un modello multi giro.
Per scegliere quale tipo di encoder adottare per ogni applicazione è bene fare come sempre un’attenta valutazione dei requisiti dell’applicazione (in termini di sicurezza e performance), ed effettuare un’analisi costi / benefici.
Se vuoi, puoi anche provare il simulatore di encoders incrementale e assoluto.