Data aggiornamento: luglio 2025.
Come si effettua il tuning di un regolatore PID? In che modo i parametri impostati influenzano il comportamento del sistema? É sempre necessario utilizzare tutti i parametri impostabili sul regolatore?
Semplice, versatile e di facile integrazione.
Ecco gli argomenti di oggi:
Le regolazioni nelle automazioni di processo.
Come funziona il controllore PID.
Il parametro proporzionale (guadagno) del PID.
Il parametro integrale dei regolatore PID.
Il parametro derivativo dei regolatore PID.
Algoritmi di regolazione PID.
Metodi per effettuare il tuning del regolatore PID.
Le regolazioni nelle automazioni di processo.
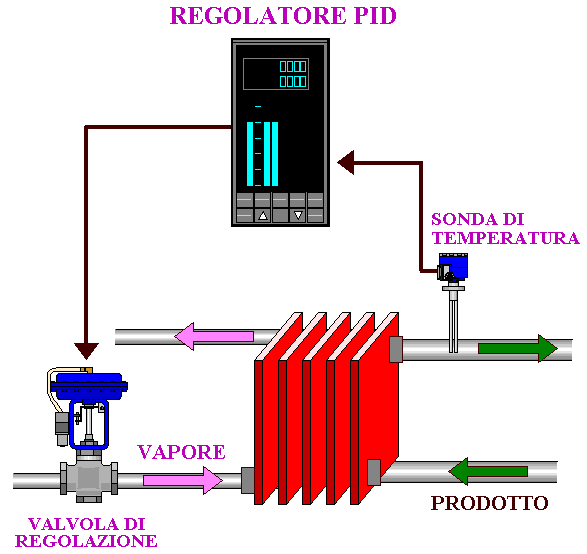
Come abbiamo visto in questa lezione sulle regolazioni PID e FUZZY, il ruolo svolto dai regolatori è oggi di fondamentale importanza nell’automazione di processi. Quando si lavora con variabili come la temperatura, la pressione, la portata, e tantissime altre, il regolatore ci permette di ottenere sistemi che rispondono alle naturali oscillazioni delle variabili stesse e ai cambiamenti di set point.
Oggi vediamo come lavorano i parametri guadagno (proporzionale), integrale e derivativo, e come effettuare un tuning degli stessi sui regolatori PID.
Come funziona il controllore PID.
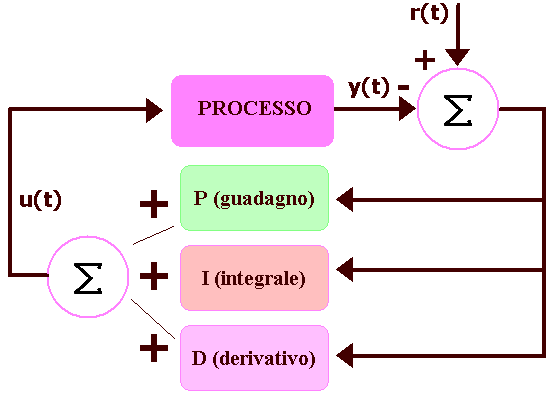
Per semplificare, possiamo affermare che un regolatore PID calcola l’uscita di comando dell’organo di regolazione valorizzando le tre azioni (proporzionale, integrale e derivativa) e moltiplicandole per l’errore del sistema; quest’ultimo è dato dalla differenza tra il valore desiderato impostato e il valore corrente della variabile di processo.
Vediamo il funzionamento appena descritto nella prossima immagine.
Il parametro proporzionale (guadagno) del PID.
Il parametro fondamentale del regolatore PID viene chiamato proporzionale, guadagno, o banda proporzionale; non c’è una standard, tuttavia quando si parla di banda proporzionale, si intende un parametro che lavora in modo inverso rispetto al guadagno.
Per ottenere lo stesso risultato, se il regolatore ha come parametro il “guadagno” oppure il “proporzionale”, aumentando il parametro aumentiamo la velocità di risposta della regolazione; la banda proporzionale invece aumenta questa velocità quando viene diminuita come parametro.
Quando aumentiamo il guadagno, in realtà è come se amplificassimo la reazione del regolatore, e in effetti il termine “guadagno” solitamente si riferisce agli amplificatori.
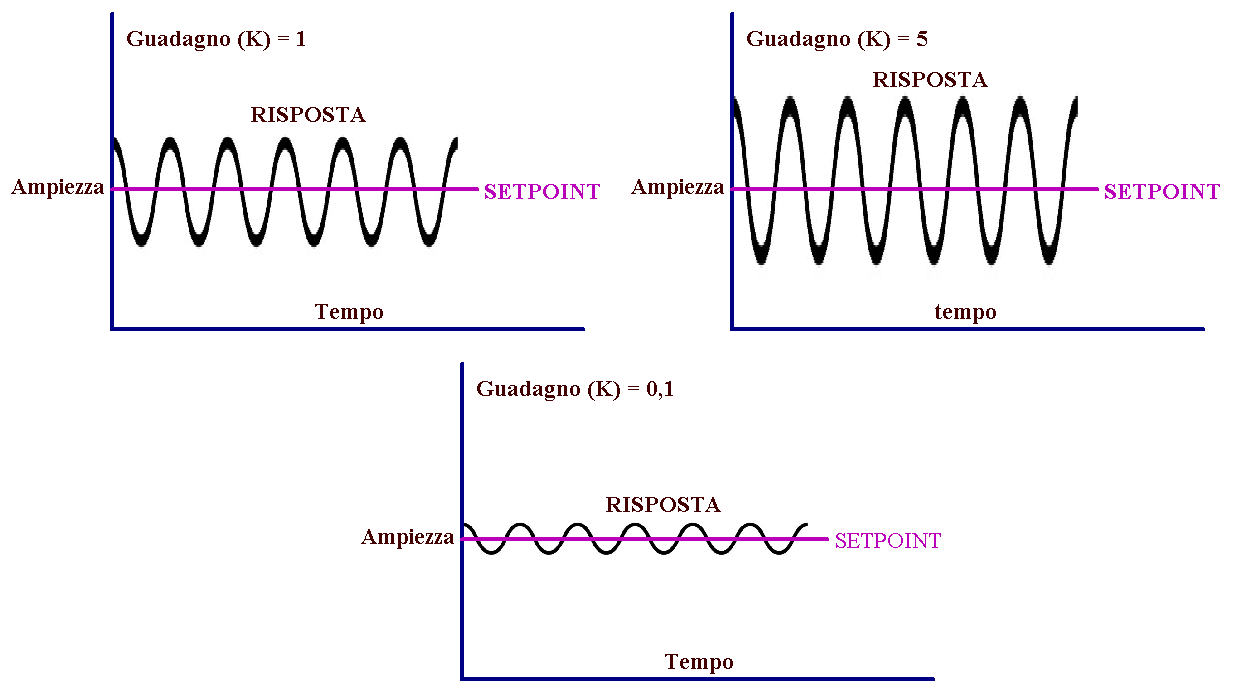
Nella prossima immagine vediamo come reagisce un regolatore PID con diversi valori di guadagno (spesso viene chiamato “K”). Si nota come con valori di guadagno bassi la curva è più smorzata, viceversa con guadagno alto (21) le oscillazioni sono molto più estese.
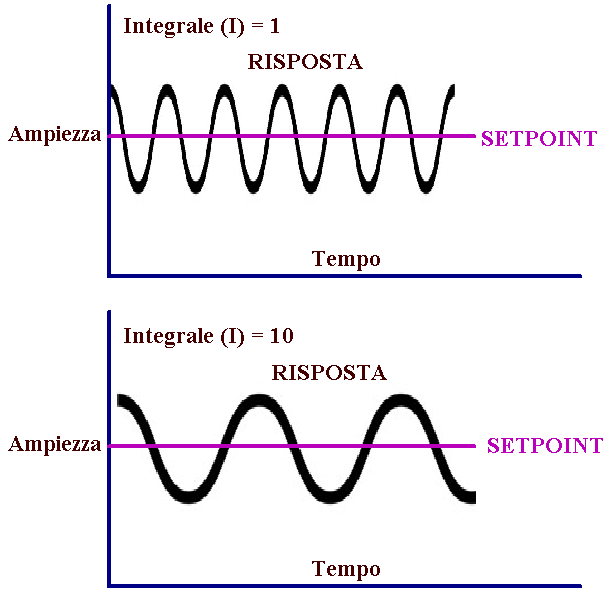
Il parametro integrale dei regolatore PID.
L’integrale, spesso indicato con la lettera “I”, viene anche chiamato reset time, e può essere espresso in ripetizioni per secondo, oppure in secondi per ripetizione, o ancora ripetizioni per minuto e minuti per ripetizione.
Al di la dell’unità di misura utilizzata per l’azione integrale del regolatore, la sua funzione è di sommare i valori della variabile di processo nel tempo, per poter decidere quanto velocemente l’azione proporzionale deve essere attuata.
Quando aumentiamo l’integrale e lo esprimiamo in secondi o minuti, rendiamo il sistema più lento, viceversa diminuendo il tempo dell’integrale (o aumentando le ripetizione per unità di tempo) il sistema diventa più reattivo.
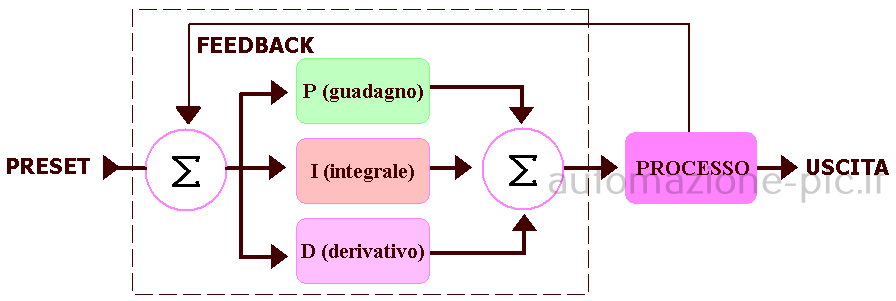
Ecco nella prossima figura l’azione integrale, possiamo vedere come questa influenzi la regolazione attuata dal parametro proporzionale (guadagno).
Il parametro derivativo dei regolatore PID.
Il terzo parametro del regolatore PID si chiama azione derivativa, e viene solitamente indicato con la lettera “D”. Questa variabile è espressa in minuti oppure secondi, e si occupa di monitorare come la variabile di processo cambia nel tempo.
Lo scopo dell’azione derivativa del regolatore è quello di cercare di prevedere il comportamento della variabile regolata nel futuro, in modo da avere un sistema di regolazione più reattivo.
Per poter funzionare bene l’azione derivativa necessita di un segnale in ingresso che esprima la variabile di processo in maniera chiara e priva di disturbi, e in effetti quest’azione molto spesso non viene abilitata, oppure viene parametrizzata con il valore zero, che equivale a non utilizzarla.
Algoritmi di regolazione PID.
Nei regolatori possiamo avere diversi algoritmi di regolazione, e alcuni di questi possono utilizzare molti parametri; a titolo d’esempio citiamo filtri, tempi di scansione, anti windup, auto regolazioni, azioni inverse, tempi morti (dead time), ritardi (lag) derivativa sull’errore oppure sulla differenza tra preset e valore corrente.
Metodi per effettuare il tuning del regolatore PID.
Vediamo ora come effettuare il tuning del regolatore pid, utilizzando il metodo più comune chiamato regolazione PI (proporzionale e integrale).
Per prima cosa, se la variabile di processo cambia velocemente impostiamo un guadagno basso, quanto basso dipende dal regolatore, nella maggior parte dei casi un valore di 0.1 rappresenta un buon punto di partenza.
Per quanto riguarda l’integrale, possiamo metterlo tra 1 e 10 ripetizioni per minuto se il regolatore necessita di unità di misura in ripetizioni; tra 6 e 60 secondi, o tra 1 e 0.1 minuti se invece il parametro è richiesto in unità di tempo.
Se invece la variabile di processo cambia lentamente possiamo partire con valori di guadagno maggiori e integrali più lenti.
Una volta impostati i parametri di partenza del regolatore, osserviamo il comportamento della variabile e aggiustiamo un parametro per volta, dando il tempo al sistema di adattarsi al cambiamento.
In questa fase torna molto utile poter visualizzare grafici che mostrano il set point, la variabile misurata e la percentuale d’uscita dell’organo di regolazione.
Procedendo a piccoli passi e pazientemente, si otterrà la regolazione migliore per il nostro processo.