
Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: luglio 2025.
Cosa sono i robot industriali antropomorfi? Cosa significa che un robot ha sei assi? Benvenuto sul mio sito dedicato all’automazione industriale, oggi parliamo dei robot industriali, e lo facciamo conoscendo il tipo di robot oggi più diffuso nell’automazione: il robot a sei assi. Scopriamo come è fatto e come funziona.

Ecco gli argomenti di oggi:
I robot nell’automazione industriale.
Il numero di assi dei robot per l’automazione.
Caratteristiche dei robot industriali a sei assi.
Come funzionano i robot industriali.
I robot nell’automazione industriale.
Quando parliamo d’automazione, parliamo di molte aree d’applicazione diverse che in certi casi si sovrappongono, e in altri casi invece sembrano totalmente distinte.
Tra le apparecchiature più diffuse e in continua evoluzione in questo settore, i robot occupano sicuramente un posto d’onore; in particolare oggi abbiamo una grandissima diffusione dei robot a sei assi.
L’utilizzo dei robot permette di svolgere compiti ripetitivi, faticosi, e in certi casi pericolosi, permettendo alle aziende di risparmiare sulla manodopera e soprattutto di assicurarsi lo svolgimento delle operazioni in modo prevedibile e sempre uguale.
I robot di oggi sono talmente precisi e veloci che con un solo di questi apparecchi si possono sostituire molteplici risorse umane. Se questo sia un bene o un male non è argomento di questo articolo ma questa è la realtà; vediamo subito cosa significa per un robot industriale possedere sei assi.
Oggi molti robot sono antropomorfi, significa che hanno una struttura e una forma che ricalca quella di alcune parti del corpo umano.
Dato che nell’industria i robot vengono impiegati per svolgere compiti che prima venivano svolti da noi, è chiaro che questi robot somiglieranno sempre di più a noi, in particolare per quanto riguarda le articolazioni e le parti del corpo che noi utilizziamo maggiormente per i lavori manuali: gli arti.
I robot a 6 assi hanno in pratica sei articolazioni che permettono loro di muoversi come noi muoviamo il nostro braccio, a ogni “giuntura” corrisponde almeno un servo di comando.
Nella prossima immagine vediamo un robot di questo tipo.
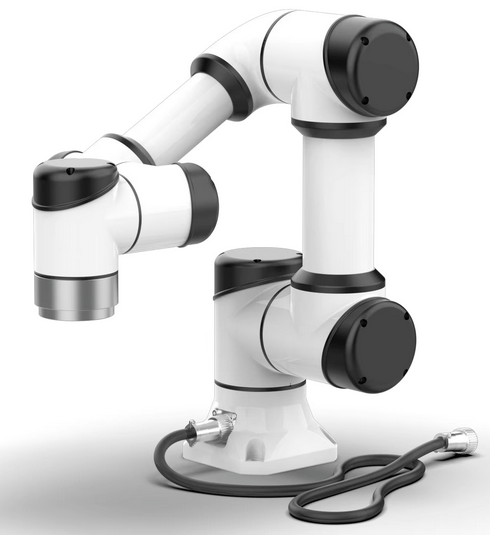
Come vediamo nella figura sopra, abbiamo una base con la prima articolazione che permette a tutto il braccio meccanico di ruotare (J1).
Poi troviamo quella che si chiama “spalla” (J2), che offre uno snodo per alzare e abbassare il braccio.
Il servo J3 rappresenta il nostro gomito e quindi lo snodo tra avambraccio e braccio.
Abbiamo poi il polso che come avviene per noi umani si può muovere su tre assi, rappresentati dagli snodi J4, J5 e J6 nella figura.
Un braccio meccanico a sei assi di questo tipo, permette alla macchina di eseguire tutti i movimenti che noi faremmo con il nostro braccio; per questo motivo i robot oggi sono diventati davvero efficaci nel sostituirci in molte operazioni manuali.
Caratteristiche dei robot industriali a sei assi.
Nel valutare i robot a sei assi, ci sono tre variabili molto importanti da considerare: il raggio d’azione, la capacità di carico e la velocità; vediamo cosa sono nel prossimo paragrafo.
A seconda del modello di robot, il braccio avrà una distanza massima alla quale operare, questa si chiama “Reach”.
Il “Payload” invece si riferisce al peso massimo che il robot può sostenere durante le operazioni.
La terza variabile è si chiama “Speed” e indica chiaramente la velocità del robot. Solitamente più grande è il robot, più lentamente esso lavorerà.
Come funzionano i robot industriali.
Abbiamo accennato nei paragrafi precedenti al fatto che i robot possiedono meccanismi per muoversi sui vari assi, a ognuno di questi corrisponde anche un freno meccanico che impedisce allo snodo di muoversi quando non è comandato.
Su alcuni assi inoltre sono presenti dei finecorsa che impediscono al robot di muoversi “oltre” il dovuto.
I servo che muovono i robot sono di tipo elettrico. Quello alla base è generalmente il servo più grande, esso infatti deve anche sopportare il movimento con il peso di tutto il braccio meccanico compreso il carico sollevato da questo. Il servo più piccolo è quello della giuntura numero sei.
Per le giunture dalla due alla cinque a seconda del tipo di robot abbiamo uno o due servo; i robot di piccole dimensioni e alcuni di media grandezza ne montano solo uno.
Per funzionare i robot hanno naturalmente bisogno anche di un’elettronica, e la gestione del braccio è affidata al controllore; vi è un apposito quadro con componenti che gestiscono l’elettronica di comando del robot, e comprendono circuiti di stop di emergenza e altra circuiteria accessoria.
Il controllore è la parte intelligente che gestisce le operazioni che il braccio deve effettuare, esso si occupa di eseguire tutti i calcoli necessari a far muovere il braccio e posizionarlo esattamente dove è necessario.
Dato che sono i servo che muovono il braccio del robot e che questi funzionano con delle tensioni specifiche, nel quadro di controllo si trovano anche degli amplificatori che convertono la tensione di rete in tensione utile per il comando.

I sistemi robotici hanno la necessità di mantenere in memoria i dati degli encoders per i servo, infatti in caso di caduta di alimentazione i conteggi degli encoders stessi sono mantenuti per mezzo di batterie tampone.
Nel caso che anche le batterie siano esaurite (vanno sostituite periodicamente), si può comunque immettere i valori degli encoders nel sistema manualmente.
Come sono controllati i robot industriali.
Come tutte le apparecchiature d’automazione che si rispettino, anche i robot offrono oggi la loro interfaccia grafica che permette di programmarli e controllarli.
In certi casi l’interfaccia è integrata al quadro di comando, in altri casi si trova su un computer, in altri ancora su terminali portatili.
