Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: luglio 2026.
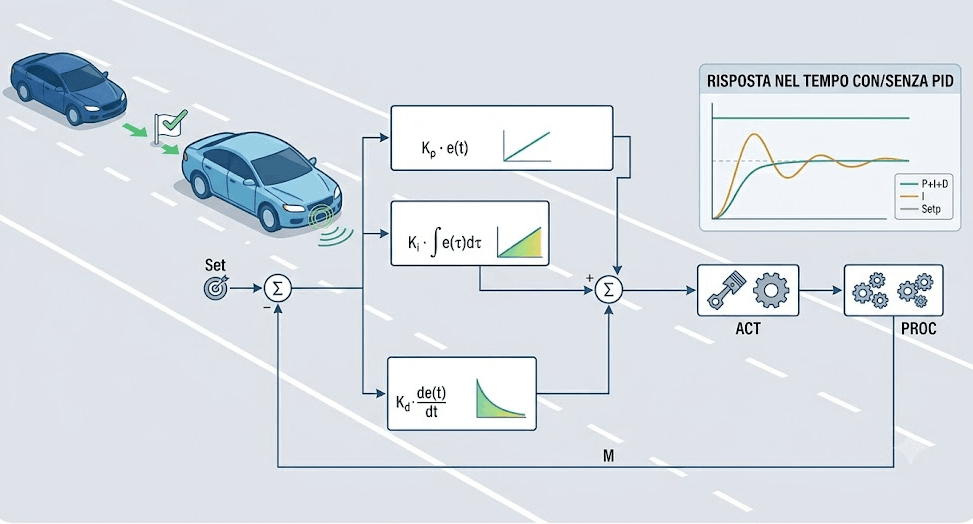
Un regolatore PID è un sistema hardware o software che permette di regolare (controllare) una variabile di processo in maniera precisa, evitando sbalzi repentini della stessa.
In questo articolo scopriamo dove oggi i regolatori sono utilizzati e come avviene il processo moderno di tuning dei parametri. Oltre a questo, su questa pagina troverai un calcolatore per parametrizzare i regolatori, e un simulatore interattivo di regolazione PID.

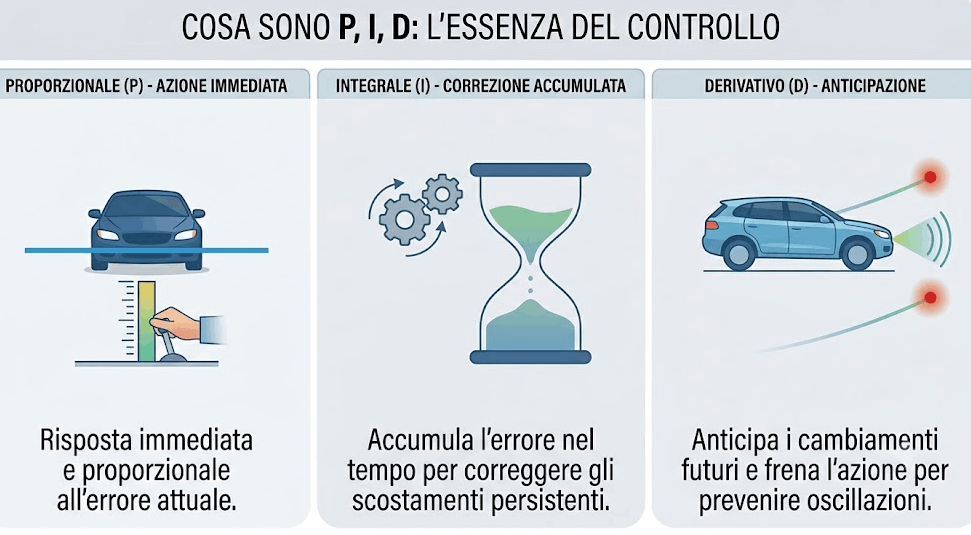
3. P, PI e PID: non sempre si utilizzano tutti i parametri.
Sebbene quando parliamo di PID ci riferiamo quasi sempre a un sistema che sfrutta tutti e tre i parametri appena visti, è bene sapere che spesso si utilizzano regolatori PI, che sfruttano solamente due delle tre azioni.
Molto dipende dal tipo di applicazione, tuttavia è più facile trovare regolatori PI che regolatori PD; inoltre praticamente tutti i regolatori sfruttano l’azione proporzionale.
3.1. Come avviene la scelta di che modello di regolatore impiegare?
La scelta di quali funzioni aggiungere al regolatore avviene soprattutto in base a tre variabili: la velocità del processo da regolare, la quantità di disturbo nel sistema, e il tipo di organo attuatore per la regolazione. Lo vediamo nella prossima tabella.
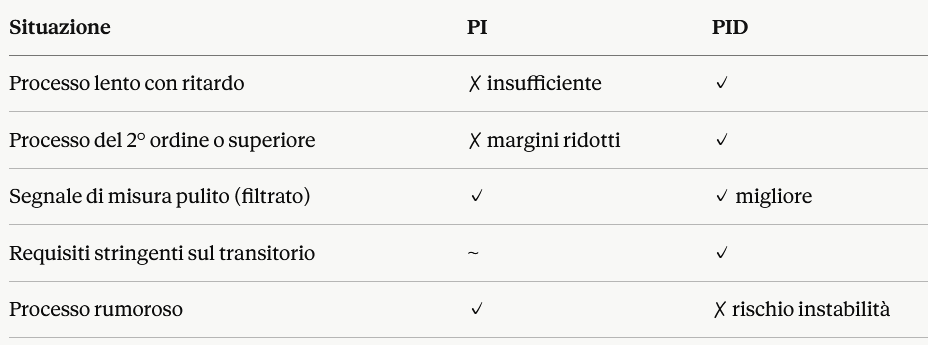
Come notiamo nella figura sopra, il regolatore PID è preferibile in tutte le situazioni, tranne che nei processi che sono molto rumorosi (disturbi sulla lettura della variabile da regolare). Nel caso di questi sistemi, l’azione derivativa rischierebbe di introdurre instabilità, per cui meglio preferire il regolatore PI.
In ogni caso, dato che la parametrizzazione dei regolatori avviene attraverso dei numeri, per escludere ognuna delle tre azioni basta porre il relativo valore a zero.
4. Impieghi dei regolatori PID in applicazioni industriali e di vita quotidiana.
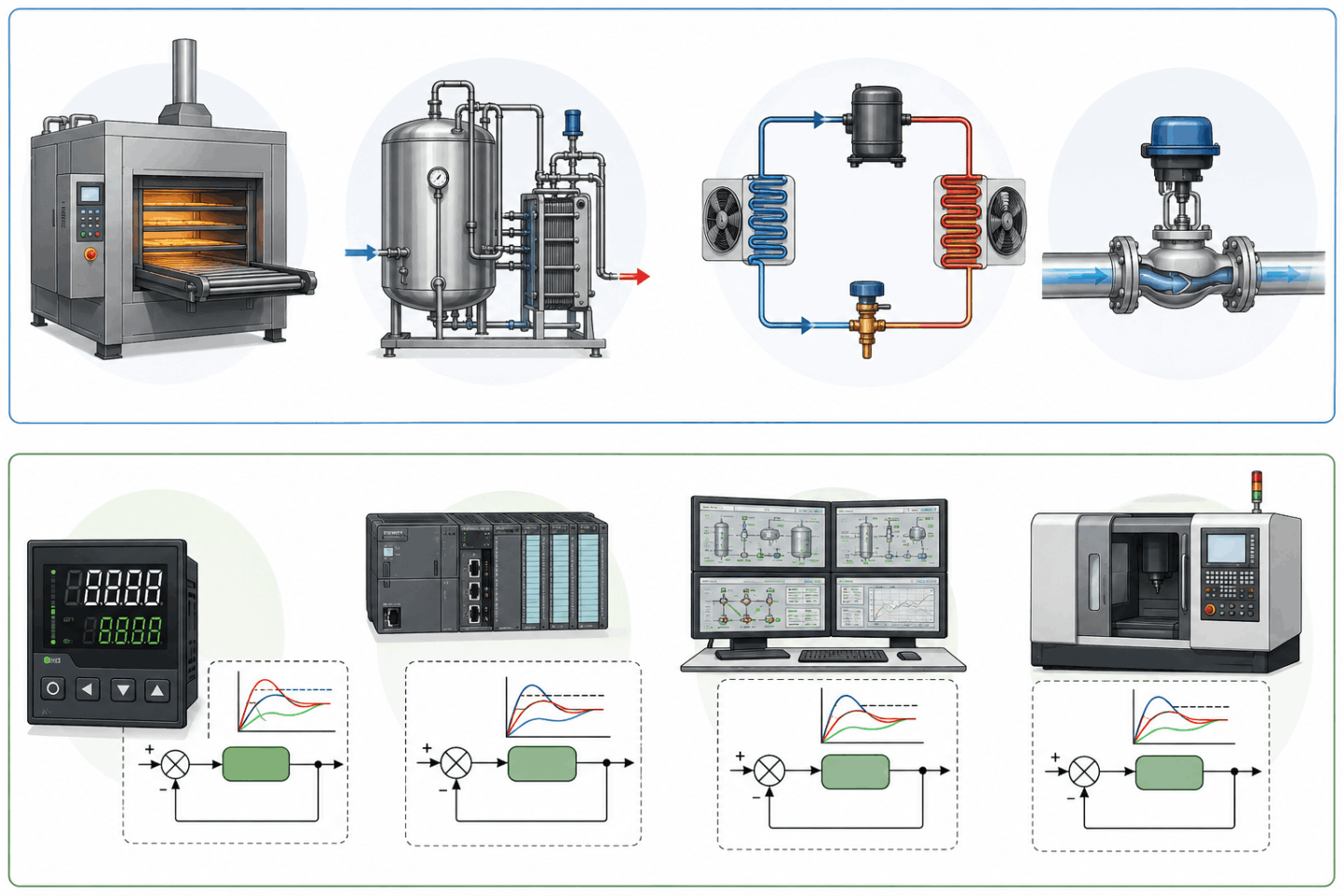
4.1. I regolatori PID nei processi industriali.
Da sempre quando diciamo PID industriale pensiamo a forni industriali, pastorizzatori, circuiti frigoriferi, condutture con portata regolabile. Tutti i processi dove è necessario regolare temperatura, pressione, portata, vedono quasi sempre l’impiego di regolatori PI e PID per la loro gestione.
La regolazione avviene attraverso hardware dedicato, oppure funzioni PID all’interno dei controllori PLC, DCS, CNC.
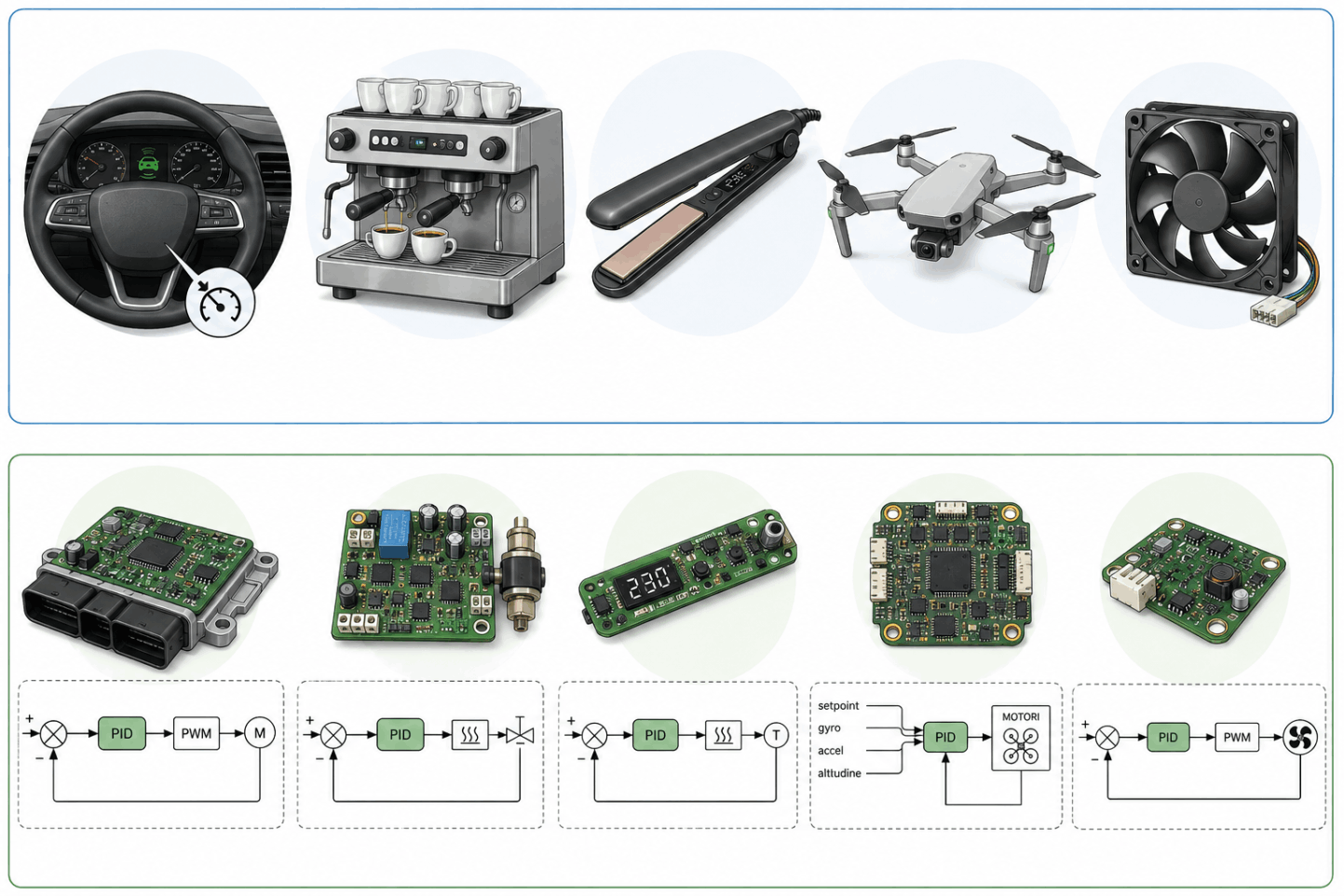
4.2. I regolatori PID nelle applicazioni di vita quotidiana.
Oggi i regolatori sono sfruttati anche in situazioni che viviamo tutti i giorni o quasi, senza nemmeno esserne consapevoli, per esempio:
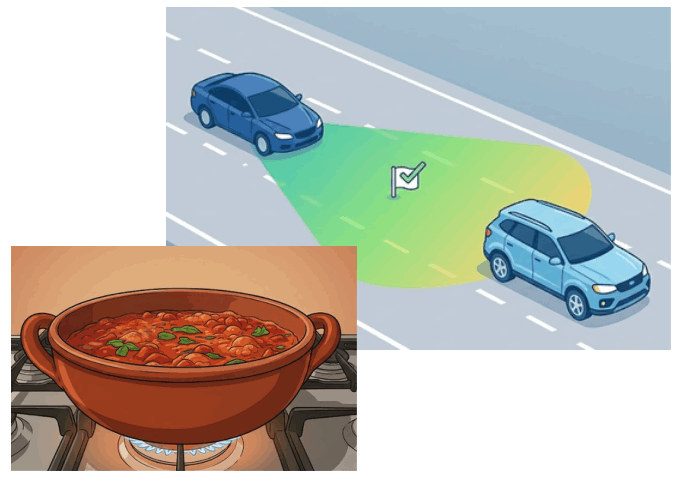
a) Cruise control delle automobili, per mantenere velocità costante, oppure distanza costante dal veicolo che ci precede.
b) Macchine da caffè espresso professionali: per mantenere la temperatura dell’acqua costante.
c) Piastre per capelli: le piastre per capelli più moderne e sofisticate impiegano regolatori PID per compensare le perdite di temperatura della piastra quando la si utilizza sui capelli umidi.
d) Droni: i regolatori sono utilizzati per controllare il movimento dei droni e la loro stabilizzazione, agendo sui motori.
e) Ventole per PC e altre apparecchiature elettroniche: in base alla temperatura all’interno dello chassis del computer, il regolatore aumenta e diminuisce la velocità della ventole di raffreddamento.
5. Parametrizzazione e tuning dei regolatori PID.
5.1. Parametri PID diversi per sistemi diversi.
Non tutti i sistemi da regolare sono uguali, e anche quelli molto simili necessitano di operazioni di fine tuning. Una prima suddivisione dei tipi di parametrizzazione la vediamo nella prossima immagine, che mostra le differenze in base ai processi da controllare.
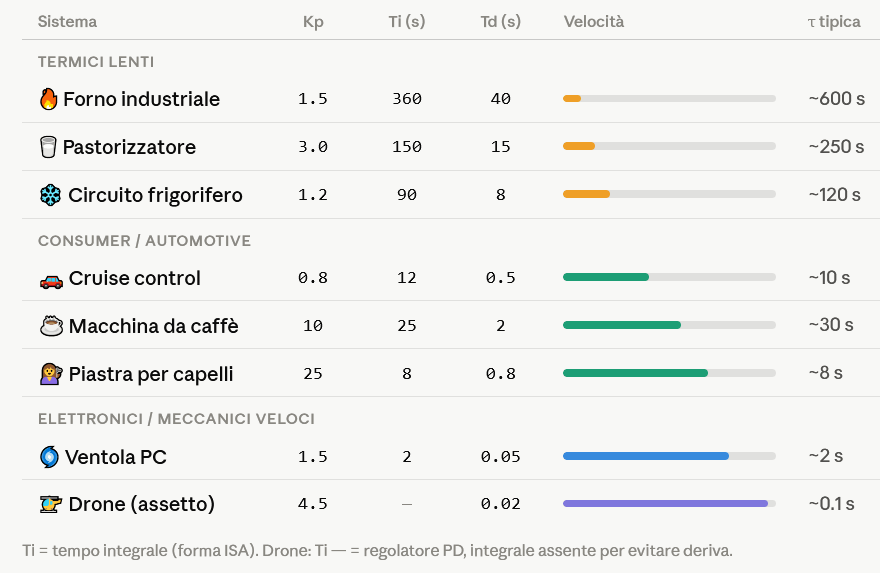
Dalla tabella sopra, si osserva che:
Il parametro Kp è tanto più alto quanto più il sistema è veloce e leggero, per esempio 1.5 per il forno, 25 per la piastra per capelli.
Il tempo integrale Ti è in linea con la costante di tempo del processo, minuti per un forno, assente sul drone.
Per quanto riguarda il derivativo Td, questo serve solo dove c'è inerzia da anticipare, risulta inutile sui sistemi lenti e rumorosi.
Come impostiamo i tempi integrale e derivativo? Come regola pratica da cui partire, possiamo impostare Ti simile alla costante di tempo del processo, e tempo derivativo (quando utilizzato) a circa un decimo di quello integrale.
5.2. Tuning dei parametri PID con metodi come lo Ziegler e Nichols.
Tarare un PID significa trovare i valori giusti dei tre parametri.
Esistono ormai da tempo metodi empirici, basati su esperimenti pratici, tra questi i due più famosi sono stati proposti da Ziegler e Nichols negli anni '40, e sono ancora usatissimi
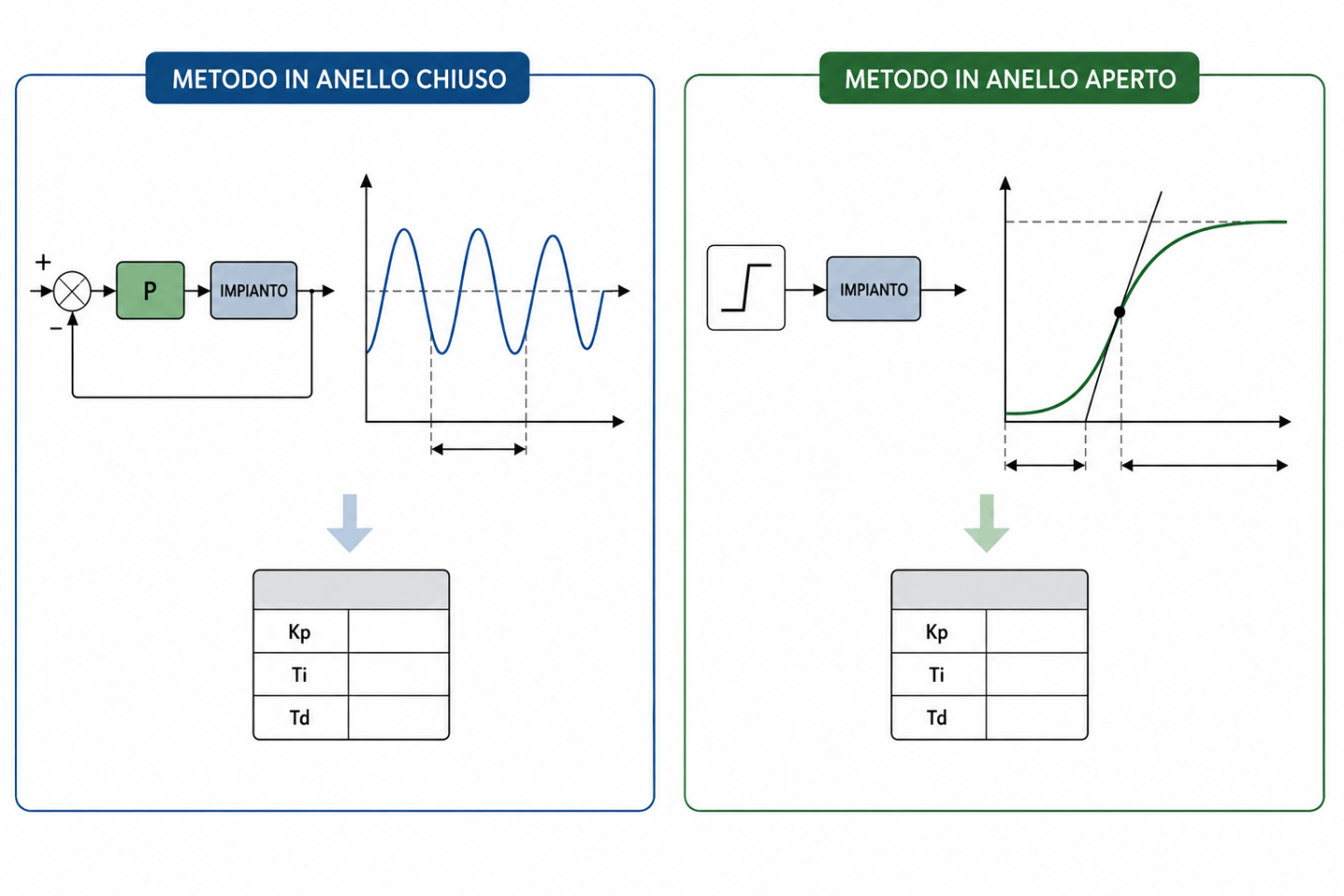
5.2.1. Metodo in anello chiuso.
Questo è il metodo che puoi sperimentare con il calcolatore presente su questa pagina; l'idea è semplice:
a) Si disattivano le azioni integrale e derivativa e si comincia solo con quella proporzionale.
Si aumenta il guadagno proporzionale poco per volta, finché il sistema non inizia a oscillare in modo continuo e abbastanza stabile.
b) Si prende nota del guadagno con cui questo succede, e si misura il tempo che intercorre tra un picco alto o basso della variabile regolata e il suo successivo.
c) Attraverso una tabella si ricavano valori di Kp, Ki e Kd; integrale e derivativo poi vengono quasi sempre convertiti nel formato ISA tempo, quindi diventeranno Ti e Td (in secondi). Gestire questi parametri come tempo risulta più semplice e intuitivo.
5.2.2. Metodo in anello aperto.
L’idea di base di questo metodo è quella di dare una brusca variazione al sistema e vedere come reagisce.
a) Si applica un segnale a gradino (un cambiamento improvviso e netto).
b) Si disegna la curva di risposta e si traccia la tangente nel punto in cui la curva sale più ripidamente.
c) Dalla posizione di quella tangente si ricavano due valori grafici.
Anche in questo caso una tabella fornisce direttamente i tre parametri del PID.
6. Calcolatore Ziegler e Nichols e simulatore di regolatore PID.
Ecco di seguito due tools: il calcolatore dei parametri seguendo il metodo anello chiuso di Ziegler e Nichols, e il simulatore di regolatore PID.
6.1 Calcolatore Ziegler e Nichols.
Introducendo i valori di guadagno limite trovato e periodo critico del sistema, il calcolatore restituisce i valori da impostare proporzionale, integrale e derivativo
Il tool mostra anche parametri diversi, in base alla scelta di utilizzo del solo regolatore P, oppure combinando PI e PID.
6.2 Simulatore di regolatore PID.
Con questo tool si può sperimentare con i vari parametri PID, e vedere come si comportano le curve della variabile di processo e dell’uscita dell’organo regolatore, in base ai parametri e agli interventi che modificano le condizioni del sistema.
Nell’esempio simuliamo il regolatore PID di un forno, e possiamo anche intervenire “aprendo il forno” e facendo scendere la temperatura, per osservare come il regolatore reagisce.
| Tipo | Kp | Ti (s) | Td (s) |
|---|---|---|---|
| P | — | — | — |
| PI | — | — | — |
| PID | — | — | — |