Autore: Luciano Guida, Automation Engineer.
Data aggiornamento: luglio 2025.
Benvenuto in questa lezione del corso di programmazione plc, oggi configureremo insieme un’istruzione di regolazione PID e ne proveremo il funzionamento cambiando i vari parametri. Oggi inoltre impareremo a convertire l’uscita analogica del regolatore in un’uscita di tipo discreto per comandare anche organi regolatori on-off.

Le regolazioni PID nei processi automatizzati.
Nei processi industriali la regolazione PID assume un ruolo fondamentale, che si tratti di una funzione svolta da un apparecchio fisico o di una procedura software, è indubbio che imparare a utilizzare queste funzioni è per i programmatori di plc qualcosa di importante.
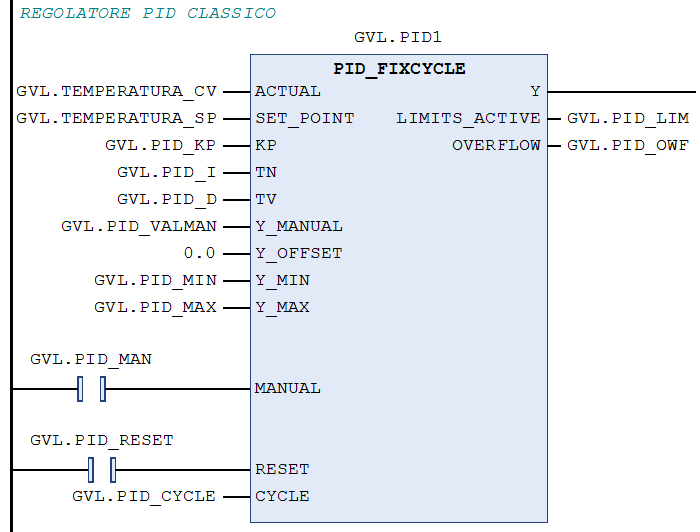
Nella lezione di oggi configuriamo un’istruzione PID in linguaggio ladder nell’ambiente di sviluppo Codesys; in particolare l’istruzione PID_FIXCYLE che è una funzione messa a disposizione dalla libreria Util del Codesys stesso.
La funzione PID_FIXCYLE è molto simile a tutte le funzioni PID standard che troviamo nei diversi ambienti di sviluppo per PLC, la vediamo nella prossima immagine.
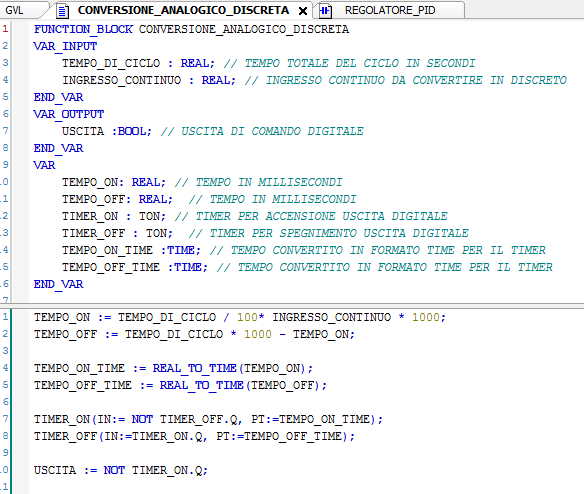
La funzione in figura sopra calcola un tempo di on e un tempo di off in base al tempo totale di ciclo fornito in ingresso, e in relazione alla percentuale che rappresenta l’uscita del regolatore analogico da convertire.
Le istruzioni moltiplicano per mille i valori poiché le funzioni timer lavorano con preset espressi in millisecondi, inoltre convertiamo i tempi da valore reali a valori di tipo TIME, proprio per poter essere accettati dalle istruzioni TON.
Nell’ultima riga troviamo la lavorazione dell’uscita che poi porteremo all’organo regolatore on / off.
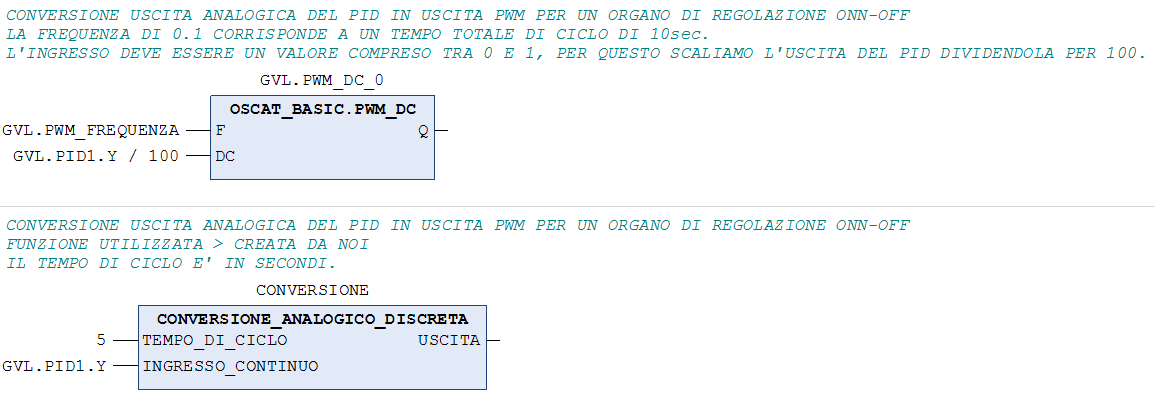
Nella figura sotto vediamo la funzione PWM_DC della libreria OSCAT BASIC, la quale esegue la conversione e accetta come ingressi un valore di frequenza (0.1 corrisponde a 10 secondi di ciclo), e come ingresso un valore da zero a uno. Per questo l’uscita 0..100 del PID gliela forniamo divisa per 100.
Nella seconda funzione invece (quella programmata da noi) il tempo di ciclo viene fornito in secondi e non c’è bisogno di scalare il valore analogico di ingresso.
Le due funzioni danno comunque un risultato identico.
Bene, siamo arrivati al termine di questa lezione di PLC dove abbiamo imparato a configurare il regolatore software e anche come convertirne l’uscita in digitale. Io vi do appuntamento alla prossima sul mio canale YouTube e qui sul mio sito; a presto!
Se vuoi, puoi visitare la pagina dedicata alla parametrizzazione, tuning e simulazione dei regolatori PID.